This is the official implementation of the paper:
"Fast Online Adaptive Neural MPC via Meta-Learning"
by Yu Mei, Xinyu Zhou, Shuyang Yu, Vaibhav Srivastava, and Xiaobo Tan.
Watch our YouTube video showcasing the control performance on the CartPole and 2D Quadrotor environments using the proposed Fast Online Meta-MPC framework.
1. Clone the repository
git clone https://github.com/yu-mei/MetaResidual-MPC.git
cd MetaResidual-MPC2. Create a conda environment
conda env create -f environment.yml
conda activate l4control3. Install l4casadi
Install the latest version using pip with --no-build-isolation (GPU/CUDA supported):
pip install l4casadi --no-build-isolation🔗 Source: github.com/Tim-Salzmann/l4casadi
4. Install acados and the acados Python interface
4.1 Clone and build Acados
Follow the official Acados installation guide.
4.2 Install the Acados Python interface
Follow the Python interface installation guide.
5. Install safe-control-gym
Follow the official safe-control-gym installation guide.
6. Override PyTorch installation
Due to version conflicts between l4casadi and safe-control-gym, it is necessary to override PyTorch:
conda install pytorch==2.5.1 torchvision==0.20.1 torchaudio==2.5.1 pytorch-cuda=12.4 -c pytorch -c nvidia
⚠️ This ensures compatibility with bothl4casadiandsafe-control-gym.
🔧 Make sure your CUDA drivers are compatible with CUDA 12.4.
7. Fix installation issues (if any)
If you encounter any remaining errors, manually install the missing or incompatible packages.
Package versions may vary depending on your system environment.
We provide several scripts under VanderPol/ for running different versions of the Van der Pol system using Meta-MPC:
| Script | Description |
|---|---|
VanderPolSys_sim.py |
Simulates the nominal Van der Pol system. |
VanderPolSys_real.py |
Simulates the real system (with mismatched dynamics). |
VanderPolSys_naive.py |
Runs nominal MPC to predict the trajectories. |
VanderPolSys_naive_lightmlp.py |
Runs nominal MPC with a lightweight learned MLP model (learn from stratch) |
VanderPolSys_naive_meta.py |
Runs MPC using a meta-learned model. |
VanderPolSys_Collection_Meta.py |
Collects offline data for training the meta-learned model, and data file vdp_meta_nominal_residual.py is under dataset |
Comparsion.ipynb |
Jupyter notebook comparing performance across methods. |
MetaLearning/Offline_Train_Meta.py |
Training the Meta MLP offline using the data file vdp_meta_nominal_residual.py |
📌 Example: Run nominal MPC + Meta MLP
cd VanderPol
python VanderPolsys_naive_meta.pyAfter running the different methods and saving results in the results/ folder, open Comparsion.ipynb to visualize and compare the performance.

We provide several scripts under Cartpole/ to run different MPC controllers for the CartPole system using our Meta-MPC framework:
| Script | Description |
|---|---|
cartpole_Nominal.py |
Runs MPC with a nominal (physics-based) model. |
cartpole_LightMLP.py |
Runs MPC using a learned residual MLP trained from scratch. |
cartpole_MetaMLP.py |
Runs MPC using a meta-learned residual MLP with online adaptation. |
cartpole_Nominal_seeds.py |
Batch test across seeds using nominal model. |
cartpole_LightMLP_seeds.py |
Batch test using residual MLP (non-meta). |
cartpole_MetaMLP_seeds.py |
Batch test using meta-residual MLP model. |
MetaLearning/DataCollection_Meta.py |
Collects residual training data for meta-learning. The output is saved in meta_dataset_mpc/. |
MetaLearning/Offline_Train_Meta.py |
Trains the Meta-Residual MLP model using the collected CSV dataset. |
meta_dataset_mpc/cartpole_meta_residual_mpc.csv |
CSV dataset collected from DataCollection_Meta.py used for offline meta-learning. |
Comparsion.ipynb |
Jupyter notebook to visualize and compare results across all methods. |
📌 Example: Run Meta-MPC with Online Adaptation
cd Cartpole
python cartpole_MetaMLP.py📌 Example: Collect Residual Data for Meta-Training
python MetaLearning/DataCollection_Meta.py📌 Example: Train Meta Residual MLP Offline
python MetaLearning/Offline_Train_Meta.pyAfter running all variants, results will be saved in the results/ folder.
Open Comparsion.ipynb to visualize metrics such as RMSE, trajectory tracking, and adaptation efficiency.



Left: Nominal MPC | Middle: Neural MPC + Residual MLP | Right: Neural MPC + Residual Meta-MLP
We provide two folders for 2D Quadrotor control tasks using our Meta-MPC framework:
Quadrotor_2D_Stabilization/: for stabilization tasksQuadrotor_2D_Tracking/: for reference trajectory tracking
Each folder contains scripts to run, which is similar as CartPole system:
📌 Example: Run Meta-MPC for Stabilization
cd Quadrotor_2D_Stabilization
python quadrotor2D_Meta.py📌 Example: Run Meta-MPC for Tracking
cd Quadrotor_2D_Tracking
python quadrotor2D_Meta.py



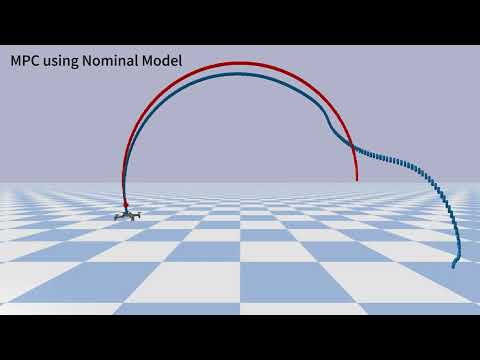
Left: Nominal MPC | Middle: MPC + Residual MLP | Right: Neural MPC + Residual Meta-MLP
![]()
![]()
![]()
Left: Nominal MPC | Middle: MPC + Residual MLP | Right: Neural MPC + Residual Meta-MLP
MetaResidual-MPC/
├── assets/ # Demo GIFs and figures used in README (e.g., CartPole_MetaMLP.gif, Quadrotor_*.gif)
├── Cartpole/ # Code for CartPole experiments
├── Quadrotor_2D_Stabilization/ # Code for 2D Quadrotor stabilization tasks
├── Quadrotor_2D_Tracking/ # Code for 2D Quadrotor trajectory tracking tasks
├── VanderPol/ # Code for Van der Pol oscillator experiments
├── environment.yml # Conda environment file
└── README.md # Project documentation
If you find our work useful, please consider citing:
@article{mei2025fast,
title={Fast Online Adaptive Neural MPC via Meta-Learning},
author={Mei, Yu and Zhou, Xinyu and Yu, Shuyang and Srivastava, Vaibhav and Tan, Xiaobo},
journal={arXiv preprint arXiv:2504.16369},
year={2025}
}